Table of Contents
Real-Time Full-Body Humanoid Robot Teleoperation Breakthrough
Humanoid robot teleoperation has long been a challenge in robotics due to the complexity of replicating freeform human movements. However, recent advancements in reinforcement learning (RL) have opened up new possibilities for controlling humanoid robots. The graphics community has successfully applied RL to produce intricate human movements, perform various tasks, and follow real-time human motions captured by a webcam in simulations.
The H2O System: A Scalable Learning-Based Approach
Researchers from Carnegie Mellon University have developed the Human to Humanoid (H2O) system, a scalable learning-based system that utilizes only an RGB camera to enable real-time whole-body humanoid robot teleoperation. Leveraging a new “sim-to-data” process and RL, the method addresses the challenging task of converting human motion into actions that a humanoid robot can execute.
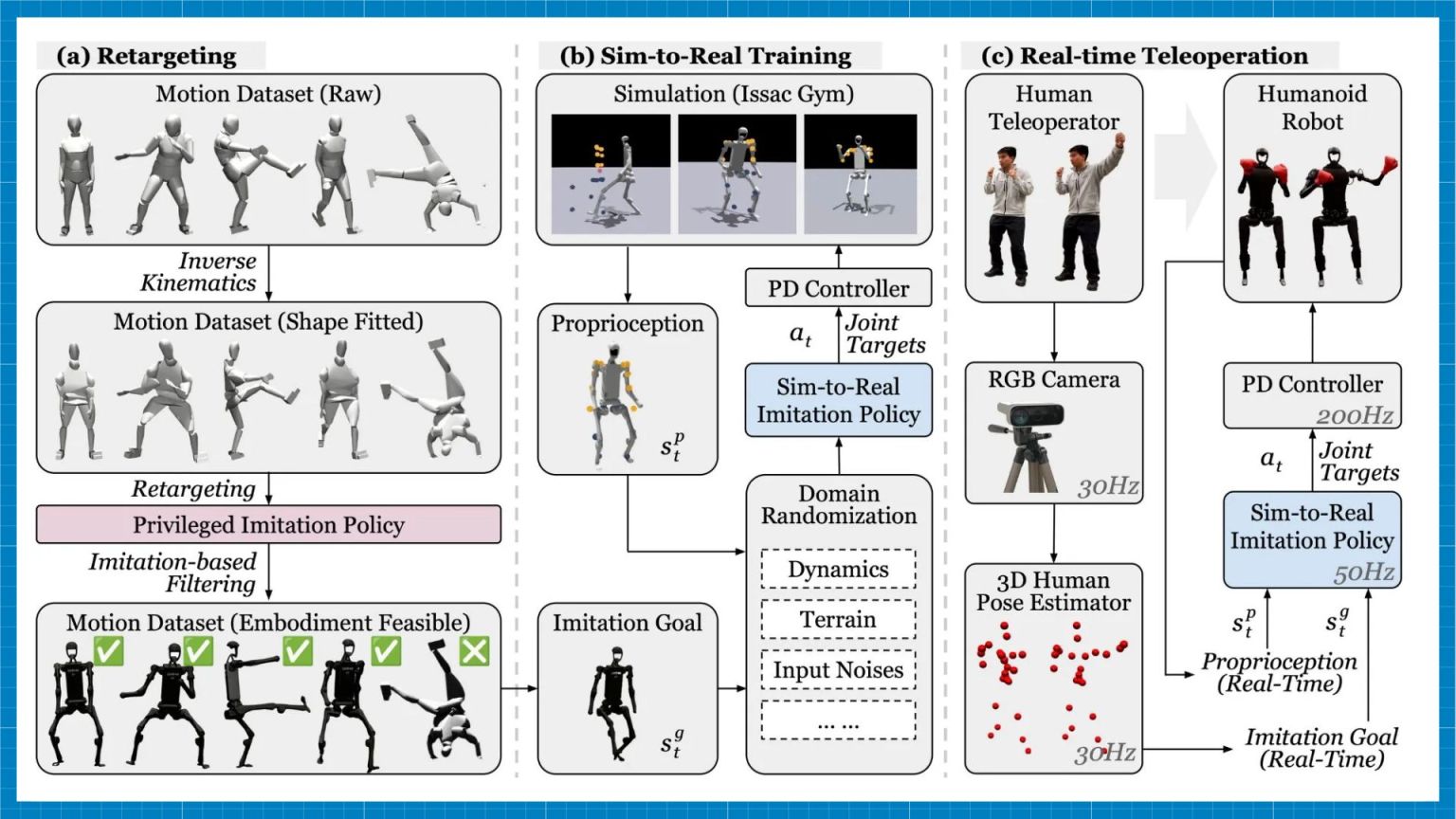
The H2O system employs a comprehensive full-body motion imitator similar to the perpetual humanoid controller (PHC), allowing for seamless training and transition to real-world deployment with zero-shot learning. This breakthrough enables a diverse array of tasks, including pick and place operations, kicking maneuvers, walking with strollers, and more, all controlled effortlessly by a human operator.
Unlocking a New Era of Human-Robot Collaboration
This innovation heralds a new era in teleoperation technology, facilitating intuitive and dynamic interactions between humans and humanoid robots with unparalleled ease and versatility. Lead researcher Tairan He envisions remotely teleoperated humanoid robots performing chores, dangerous missions, and complex tasks requiring human-like dexterity and adaptability.
The ultimate goal of the team is to enable the humanoid robot to mimic as many human-demonstrated movements as possible. Future research could explore the development of a teleoperated humanoid robot capable of transitioning between robust locomotion and skillful lower-body tracking, further expanding the capabilities of human-robot collaboration.